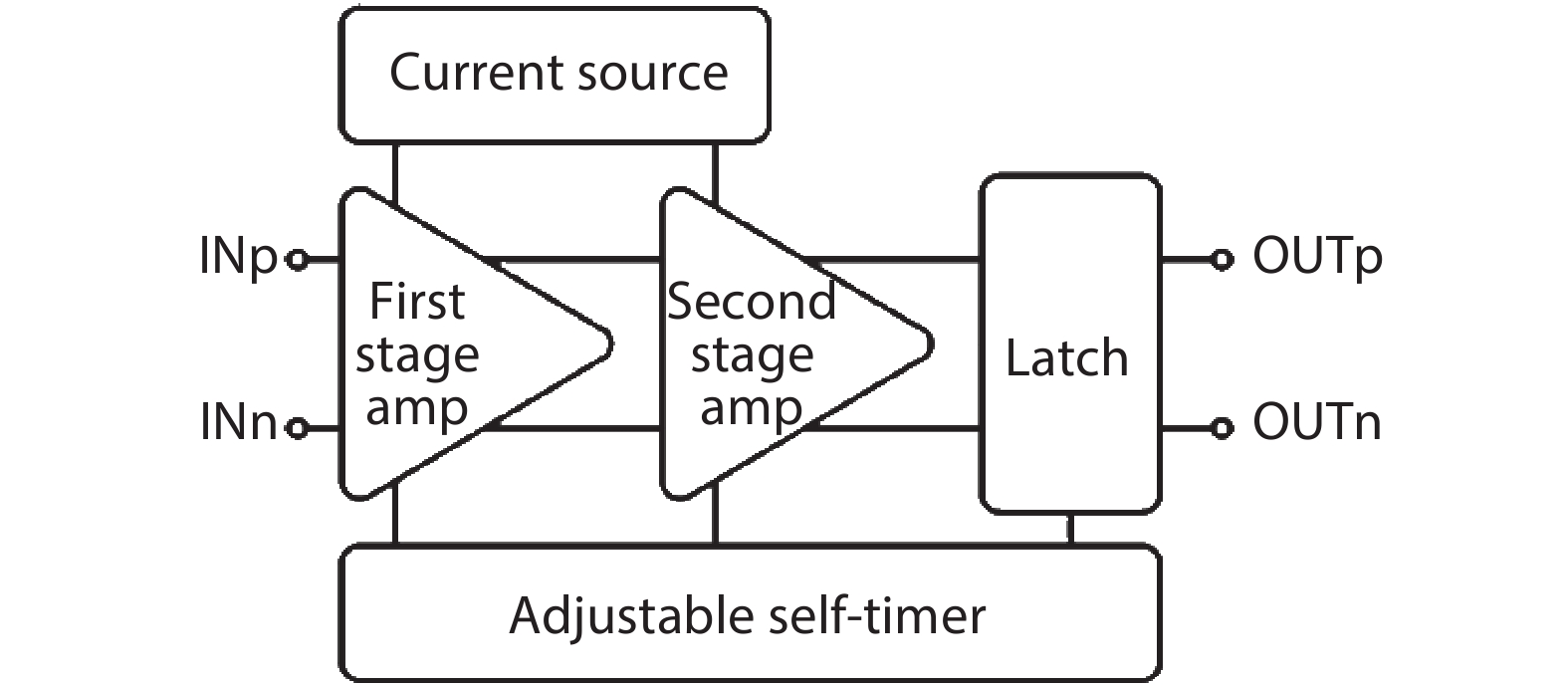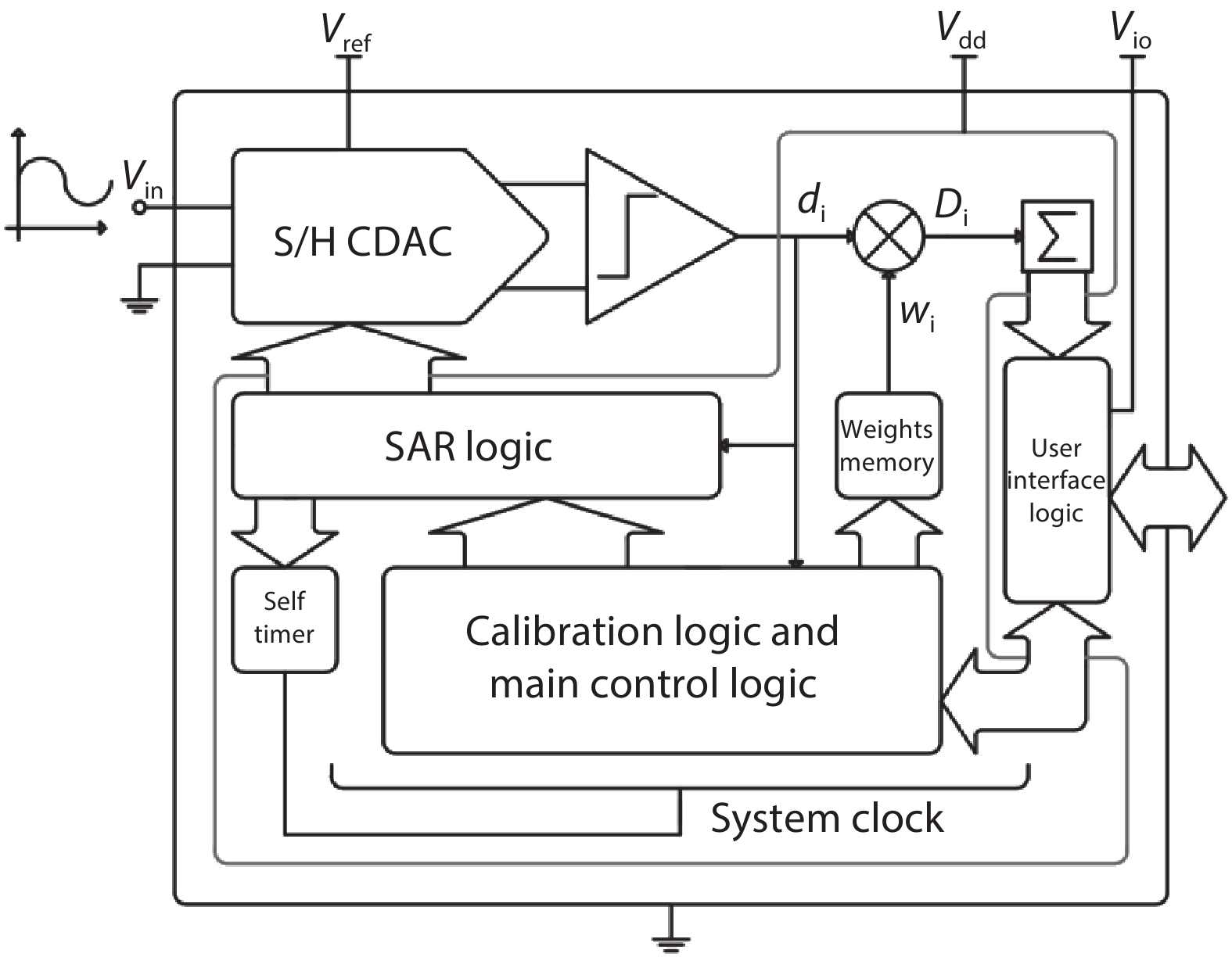
Fig. 1.
The ADC system architecture.
ARTICLES
Xian Zhang1, Xiaodong Cao1, 2, and Xuelian Zhang2
Corresponding author: Xiaodong Cao, Email: xdcao@semi.ac.cn
Abstract: In this paper, a 16-bit 1MSPS foreground calibration successive approximation register analog-to-digital converter (SAR ADC) is developed by the CMOS 0.25 μm process. An on-chip all-digital foreground weights calibration technique integrating self-calibration weight measurement with PN port auto-balance technique is designed to improve the performance and lower the costs of the developed SAR ADC. The SAR ADC has a chip area of 2.7 × 2.4 mm2, and consumes only 100 μW at the 2.5 V supply voltage with 100 KSPS. The INL and DNL are both less than 0.5 LSB.
Key words: foreground all-digital calibration, RS strategy, RS-based dither, auto-zero comparator, SAR ADC
| [1] |
Kim W, Hong H K, Roh Y J, et al. A 0.6 V 12 b 10 MS/s low-noise asynchronous SAR-assisted time-interleaved SAR (SATI-SAR) ADC. IEEE J Solid-State Circuits, 2016, 51, 1826 doi: 10.1109/JSSC.2016.2563780
|
| [2] |
Shikata A, Sekimoto R, Kuroda T, et al. A 0.5 V 1.1 MS/sec 6.3 fJ/conversion-Step SAR-ADC with tri-level comparator in 40 nm CMOS. IEEE J Solid-State Circuits, 2012, 47, 1022 doi: 10.1109/JSSC.2012.2185352
|
| [3] |
Harpe P, Cantatore E, van Roermund A. A 10b/12b 40 kS/s SAR ADC with data-driven noise reduction achieving up to 10.1b ENOB at 2.2 fJ/conversion-step. IEEE J Solid-State Circuits, 2013, 48, 3011 doi: 10.1109/JSSC.2013.2278471
|
| [4] |
Nuzzo P, De Bernardinis F, Terreni P, et al. Noise analysis of regenerative comparators for reconfigurable ADC architectures. IEEE Trans Circuits Syst I, 2008, 55, 1441 doi: 10.1109/TCSI.2008.917991
|
| [5] |
Verbruggen B, Tsouhlarakis J, Yamamoto T, et al. A 60 dB SNDR 35 MS/s SAR ADC with comparator-noise-based stochastic residue estimation. IEEE J Solid-State Circuits, 2015, 50, 2002 doi: 10.1109/JSSC.2015.2422781
|
| [6] |
Zhong J Y, Zhu Y, Chan C H, et al. A 12b 180MS/s 0.068mm2 with full-calibration-integrated pipelined-SAR ADC. IEEE Trans Circuits Syst I, 2017, 64, 1684 doi: 10.1109/TCSI.2017.2679748
|
| [7] |
Verma N, Chandrakasan A P. An ultra low energy 12-bit rate-resolution scalable SAR ADC for wireless sensor nodes. IEEE J Solid-State Circuits, 2007, 42, 1196 doi: 10.1109/JSSC.2007.897157
|
| [8] |
Shen J H, Shikata A, Fernando L D, et al. A 16-bit 16-MS/s SAR ADC with on-chip calibration in 55-nm CMOS. IEEE J Solid-State Circuits, 2018, 53, 1149 doi: 10.1109/JSSC.2017.2784761
|
| [9] |
Chen Y, Zhu X, Tamura H, et al. Split capacitor DAC mismatch calibration in successive approximation ADC. IEICE Trans Electron, 2010, 93, 295 doi: 10.1109/CICC.2009.5280859
|
| [10] |
McNeill J A, Chan K Y, Coln M C W, et al. All-digital background calibration of a successive approximation ADC using the “split ADC” architecture. IEEE Trans Circuits Syst I, 2011, 58, 2355 doi: 10.1109/TCSI.2011.2123590
|
| [11] |
Hummerston D, Hurrell P. An 18-bit 2MS/s pipelined SAR ADC utilizing a sampling distortion cancellation circuit with –107dB THD at 100kHz. 2017 Symp VLSI Circuits, 2017, C280
|
| [12] |
McCreary J L, Gray P R. All-MOS charge redistribution analog-to-digital conversion techniques. I. IEEE J Solid-State Circuits, 1975, 10, 371 doi: 10.1109/JSSC.1975.1050629
|
| [13] |
Harpe P J, Zhou C, Bi Y, et al. A 26 W 8 bit 10 MS/s asynchronous SAR ADC for low energy radios. IEEE J Solid-State Circuits, 2011, 46, 1585 doi: 10.1109/JSSC.2011.2143870
|
| [14] |
Li H X, Maddox M, Coln M C W, et al. A signal-independent background-calibrating 20b 1MS/s SAR ADC with 0.3ppm INL. 2018 IEEE International Solid-State Circuits Conference, 2018
|
| [15] |
Liu C C, Chang S J, Huang G Y, et al. A 10-bit 50-MS/s SAR ADC with a monotonic capacitor switching procedure. IEEE J Solid-State Circuits, 2010, 45, 731 doi: 10.1109/JSSC.2010.2042254
|
| [16] |
Harpe P, Zhang Y, Dolmans G, et al. A 7-to-10b 0-to-4MS/s flexible SAR ADC with 6.5-to-16fJ/conversion-step. 2012 IEEE International Solid-State Circuits Conference, 2012, 472
|
| [17] |
Seo M J, Roh Y J, Chang D J, et al. A reusable code-based SAR ADC design with CDAC compiler and synthesizable analog building blocks. IEEE Trans Circuits Syst II, 2018, 65, 1904 doi: 10.1109/TCSII.2018.2822811
|
| [18] |
Harpe P, Cantatore E, van Roermund A. An oversampled 12/14b SAR ADC with noise reduction and linearity enhancements achieving up to 79.1dB SNDR. 2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC), 2014, 194
|
| [19] |
Miki T, Morie T, Matsukawa K, et al. A 4.2 mW 50 MS/s 13 bit CMOS SAR ADC With SNR and SFDR enhancement techniques. IEEE J Solid-State Circuits, 2015, 50, 1372 doi: 10.1109/JSSC.2015.2417803
|
| [20] |
Hurrell C P, Lyden C, Laing D, et al. An 18 b 12.5 MS/s ADC with 93 dB SNR. IEEE J Solid-State Circuits, 2010, 45, 2647 doi: 10.1109/JSSC.2010.2075310
|
| [21] |
Wagdy M F, Goff M. Linearizing average transfer characteristics of ideal ADC's via analog and digital dither. IEEE Trans Instrum Meas, 1994, 43, 146 doi: 10.1109/19.293411
|
| [22] |
Lee C C, Lu C Y, Narayanaswamy R, et al. A 12b 70MS/s SAR ADC with digital startup calibration in 14nm CMOS. 2015 Symposium on VLSI Circuits (VLSI Circuits), 2015, C62
|
| [23] |
Shen J H, Shikata A, Fernando L, et al. A 16-bit 16MS/s SAR ADC with on-chip calibration in 55nm CMOS. 2017 Symposium on VLSI Circuits Digest of Technical Papers, 2017
|
| [24] |
Maddox M, Chen B Z, Coln M, et al. A 16 bit linear passive-charge-sharing SAR ADC in 55nm CMOS. 2016 IEEE Asian Solid-State Circuits Conf (A-SSCC), 2016, 153
|




Table 1. Weight calculation.
 DownLoad: CSV
DownLoad: CSV
Table 2. The comparison with high-resolution and medium-speed SAR ADCs.
| Parameter | Shen[8] | Maddox[24] | Mc Neill[10] | This work |
| Type | SAR | SAR | SAR | SAR |
| Resolution (bit) | 16-bit | 16-bit | 16-bit | 16-bit |
| Speed (MS/s) | 16 | 1 | 1 | 1 |
| INL (LSB) | –1.9/+2.3 | –0.8/0.8 | –0.5/+0.5 | –0.5/0.5 |
| DNL (LSB) | –0.8/+0.8 | –0.3/0.3 | –0.5/+0.5 | –0.8/0.8 |
| SFDR (dB)/ SNDR (dB) | 98/78 | 100/81 | NA | 110/101 |
| Power (mW) | 16 | 6.95 | NA | 11 |
| FOM (dB) | 138 | 129 | NA | 127 |
| Area (mm2) | 0.55 | 4.1 | 1.92 | 6.48 |
| Calibration | On-chip | Off-chip | On-chip | On-chip |
| Process (nm) | 55 | 55 | 180 | 250 |
DownLoad: CSV
| [1] |
Kim W, Hong H K, Roh Y J, et al. A 0.6 V 12 b 10 MS/s low-noise asynchronous SAR-assisted time-interleaved SAR (SATI-SAR) ADC. IEEE J Solid-State Circuits, 2016, 51, 1826 doi: 10.1109/JSSC.2016.2563780
|
| [2] |
Shikata A, Sekimoto R, Kuroda T, et al. A 0.5 V 1.1 MS/sec 6.3 fJ/conversion-Step SAR-ADC with tri-level comparator in 40 nm CMOS. IEEE J Solid-State Circuits, 2012, 47, 1022 doi: 10.1109/JSSC.2012.2185352
|
| [3] |
Harpe P, Cantatore E, van Roermund A. A 10b/12b 40 kS/s SAR ADC with data-driven noise reduction achieving up to 10.1b ENOB at 2.2 fJ/conversion-step. IEEE J Solid-State Circuits, 2013, 48, 3011 doi: 10.1109/JSSC.2013.2278471
|
| [4] |
Nuzzo P, De Bernardinis F, Terreni P, et al. Noise analysis of regenerative comparators for reconfigurable ADC architectures. IEEE Trans Circuits Syst I, 2008, 55, 1441 doi: 10.1109/TCSI.2008.917991
|
| [5] |
Verbruggen B, Tsouhlarakis J, Yamamoto T, et al. A 60 dB SNDR 35 MS/s SAR ADC with comparator-noise-based stochastic residue estimation. IEEE J Solid-State Circuits, 2015, 50, 2002 doi: 10.1109/JSSC.2015.2422781
|
| [6] |
Zhong J Y, Zhu Y, Chan C H, et al. A 12b 180MS/s 0.068mm2 with full-calibration-integrated pipelined-SAR ADC. IEEE Trans Circuits Syst I, 2017, 64, 1684 doi: 10.1109/TCSI.2017.2679748
|
| [7] |
Verma N, Chandrakasan A P. An ultra low energy 12-bit rate-resolution scalable SAR ADC for wireless sensor nodes. IEEE J Solid-State Circuits, 2007, 42, 1196 doi: 10.1109/JSSC.2007.897157
|
| [8] |
Shen J H, Shikata A, Fernando L D, et al. A 16-bit 16-MS/s SAR ADC with on-chip calibration in 55-nm CMOS. IEEE J Solid-State Circuits, 2018, 53, 1149 doi: 10.1109/JSSC.2017.2784761
|
| [9] |
Chen Y, Zhu X, Tamura H, et al. Split capacitor DAC mismatch calibration in successive approximation ADC. IEICE Trans Electron, 2010, 93, 295 doi: 10.1109/CICC.2009.5280859
|
| [10] |
McNeill J A, Chan K Y, Coln M C W, et al. All-digital background calibration of a successive approximation ADC using the “split ADC” architecture. IEEE Trans Circuits Syst I, 2011, 58, 2355 doi: 10.1109/TCSI.2011.2123590
|
| [11] |
Hummerston D, Hurrell P. An 18-bit 2MS/s pipelined SAR ADC utilizing a sampling distortion cancellation circuit with –107dB THD at 100kHz. 2017 Symp VLSI Circuits, 2017, C280
|
| [12] |
McCreary J L, Gray P R. All-MOS charge redistribution analog-to-digital conversion techniques. I. IEEE J Solid-State Circuits, 1975, 10, 371 doi: 10.1109/JSSC.1975.1050629
|
| [13] |
Harpe P J, Zhou C, Bi Y, et al. A 26 W 8 bit 10 MS/s asynchronous SAR ADC for low energy radios. IEEE J Solid-State Circuits, 2011, 46, 1585 doi: 10.1109/JSSC.2011.2143870
|
| [14] |
Li H X, Maddox M, Coln M C W, et al. A signal-independent background-calibrating 20b 1MS/s SAR ADC with 0.3ppm INL. 2018 IEEE International Solid-State Circuits Conference, 2018
|
| [15] |
Liu C C, Chang S J, Huang G Y, et al. A 10-bit 50-MS/s SAR ADC with a monotonic capacitor switching procedure. IEEE J Solid-State Circuits, 2010, 45, 731 doi: 10.1109/JSSC.2010.2042254
|
| [16] |
Harpe P, Zhang Y, Dolmans G, et al. A 7-to-10b 0-to-4MS/s flexible SAR ADC with 6.5-to-16fJ/conversion-step. 2012 IEEE International Solid-State Circuits Conference, 2012, 472
|
| [17] |
Seo M J, Roh Y J, Chang D J, et al. A reusable code-based SAR ADC design with CDAC compiler and synthesizable analog building blocks. IEEE Trans Circuits Syst II, 2018, 65, 1904 doi: 10.1109/TCSII.2018.2822811
|
| [18] |
Harpe P, Cantatore E, van Roermund A. An oversampled 12/14b SAR ADC with noise reduction and linearity enhancements achieving up to 79.1dB SNDR. 2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC), 2014, 194
|
| [19] |
Miki T, Morie T, Matsukawa K, et al. A 4.2 mW 50 MS/s 13 bit CMOS SAR ADC With SNR and SFDR enhancement techniques. IEEE J Solid-State Circuits, 2015, 50, 1372 doi: 10.1109/JSSC.2015.2417803
|
| [20] |
Hurrell C P, Lyden C, Laing D, et al. An 18 b 12.5 MS/s ADC with 93 dB SNR. IEEE J Solid-State Circuits, 2010, 45, 2647 doi: 10.1109/JSSC.2010.2075310
|
| [21] |
Wagdy M F, Goff M. Linearizing average transfer characteristics of ideal ADC's via analog and digital dither. IEEE Trans Instrum Meas, 1994, 43, 146 doi: 10.1109/19.293411
|
| [22] |
Lee C C, Lu C Y, Narayanaswamy R, et al. A 12b 70MS/s SAR ADC with digital startup calibration in 14nm CMOS. 2015 Symposium on VLSI Circuits (VLSI Circuits), 2015, C62
|
| [23] |
Shen J H, Shikata A, Fernando L, et al. A 16-bit 16MS/s SAR ADC with on-chip calibration in 55nm CMOS. 2017 Symposium on VLSI Circuits Digest of Technical Papers, 2017
|
| [24] |
Maddox M, Chen B Z, Coln M, et al. A 16 bit linear passive-charge-sharing SAR ADC in 55nm CMOS. 2016 IEEE Asian Solid-State Circuits Conf (A-SSCC), 2016, 153
|









Article views: 5014 Times PDF downloads: 271 Times Cited by: 0 Times
Received: 19 March 2020 Revised: 12 May 2020 Online: Accepted Manuscript: 23 July 2020Uncorrected proof: 30 July 2020Published: 08 December 2020
| Citation: |
Xian Zhang, Xiaodong Cao, Xuelian Zhang. A 16-bit 1 MSPS SAR ADC with foreground calibration and residual voltage shift strategy[J]. Journal of Semiconductors, 2020, 41(12): 122401. doi: 10.1088/1674-4926/41/12/122401
X Zhang, X D Cao, X L Zhang, A 16-bit 1 MSPS SAR ADC with foreground calibration and residual voltage shift strategy[J]. J. Semicond., 2020, 41(12): 122401. doi: 10.1088/1674-4926/41/12/122401.
Export: BibTex EndNote

|
| [1] |
Kim W, Hong H K, Roh Y J, et al. A 0.6 V 12 b 10 MS/s low-noise asynchronous SAR-assisted time-interleaved SAR (SATI-SAR) ADC. IEEE J Solid-State Circuits, 2016, 51, 1826 doi: 10.1109/JSSC.2016.2563780
|
| [2] |
Shikata A, Sekimoto R, Kuroda T, et al. A 0.5 V 1.1 MS/sec 6.3 fJ/conversion-Step SAR-ADC with tri-level comparator in 40 nm CMOS. IEEE J Solid-State Circuits, 2012, 47, 1022 doi: 10.1109/JSSC.2012.2185352
|
| [3] |
Harpe P, Cantatore E, van Roermund A. A 10b/12b 40 kS/s SAR ADC with data-driven noise reduction achieving up to 10.1b ENOB at 2.2 fJ/conversion-step. IEEE J Solid-State Circuits, 2013, 48, 3011 doi: 10.1109/JSSC.2013.2278471
|
| [4] |
Nuzzo P, De Bernardinis F, Terreni P, et al. Noise analysis of regenerative comparators for reconfigurable ADC architectures. IEEE Trans Circuits Syst I, 2008, 55, 1441 doi: 10.1109/TCSI.2008.917991
|
| [5] |
Verbruggen B, Tsouhlarakis J, Yamamoto T, et al. A 60 dB SNDR 35 MS/s SAR ADC with comparator-noise-based stochastic residue estimation. IEEE J Solid-State Circuits, 2015, 50, 2002 doi: 10.1109/JSSC.2015.2422781
|
| [6] |
Zhong J Y, Zhu Y, Chan C H, et al. A 12b 180MS/s 0.068mm2 with full-calibration-integrated pipelined-SAR ADC. IEEE Trans Circuits Syst I, 2017, 64, 1684 doi: 10.1109/TCSI.2017.2679748
|
| [7] |
Verma N, Chandrakasan A P. An ultra low energy 12-bit rate-resolution scalable SAR ADC for wireless sensor nodes. IEEE J Solid-State Circuits, 2007, 42, 1196 doi: 10.1109/JSSC.2007.897157
|
| [8] |
Shen J H, Shikata A, Fernando L D, et al. A 16-bit 16-MS/s SAR ADC with on-chip calibration in 55-nm CMOS. IEEE J Solid-State Circuits, 2018, 53, 1149 doi: 10.1109/JSSC.2017.2784761
|
| [9] |
Chen Y, Zhu X, Tamura H, et al. Split capacitor DAC mismatch calibration in successive approximation ADC. IEICE Trans Electron, 2010, 93, 295 doi: 10.1109/CICC.2009.5280859
|
| [10] |
McNeill J A, Chan K Y, Coln M C W, et al. All-digital background calibration of a successive approximation ADC using the “split ADC” architecture. IEEE Trans Circuits Syst I, 2011, 58, 2355 doi: 10.1109/TCSI.2011.2123590
|
| [11] |
Hummerston D, Hurrell P. An 18-bit 2MS/s pipelined SAR ADC utilizing a sampling distortion cancellation circuit with –107dB THD at 100kHz. 2017 Symp VLSI Circuits, 2017, C280
|
| [12] |
McCreary J L, Gray P R. All-MOS charge redistribution analog-to-digital conversion techniques. I. IEEE J Solid-State Circuits, 1975, 10, 371 doi: 10.1109/JSSC.1975.1050629
|
| [13] |
Harpe P J, Zhou C, Bi Y, et al. A 26 W 8 bit 10 MS/s asynchronous SAR ADC for low energy radios. IEEE J Solid-State Circuits, 2011, 46, 1585 doi: 10.1109/JSSC.2011.2143870
|
| [14] |
Li H X, Maddox M, Coln M C W, et al. A signal-independent background-calibrating 20b 1MS/s SAR ADC with 0.3ppm INL. 2018 IEEE International Solid-State Circuits Conference, 2018
|
| [15] |
Liu C C, Chang S J, Huang G Y, et al. A 10-bit 50-MS/s SAR ADC with a monotonic capacitor switching procedure. IEEE J Solid-State Circuits, 2010, 45, 731 doi: 10.1109/JSSC.2010.2042254
|
| [16] |
Harpe P, Zhang Y, Dolmans G, et al. A 7-to-10b 0-to-4MS/s flexible SAR ADC with 6.5-to-16fJ/conversion-step. 2012 IEEE International Solid-State Circuits Conference, 2012, 472
|
| [17] |
Seo M J, Roh Y J, Chang D J, et al. A reusable code-based SAR ADC design with CDAC compiler and synthesizable analog building blocks. IEEE Trans Circuits Syst II, 2018, 65, 1904 doi: 10.1109/TCSII.2018.2822811
|
| [18] |
Harpe P, Cantatore E, van Roermund A. An oversampled 12/14b SAR ADC with noise reduction and linearity enhancements achieving up to 79.1dB SNDR. 2014 IEEE International Solid-State Circuits Conference Digest of Technical Papers (ISSCC), 2014, 194
|
| [19] |
Miki T, Morie T, Matsukawa K, et al. A 4.2 mW 50 MS/s 13 bit CMOS SAR ADC With SNR and SFDR enhancement techniques. IEEE J Solid-State Circuits, 2015, 50, 1372 doi: 10.1109/JSSC.2015.2417803
|
| [20] |
Hurrell C P, Lyden C, Laing D, et al. An 18 b 12.5 MS/s ADC with 93 dB SNR. IEEE J Solid-State Circuits, 2010, 45, 2647 doi: 10.1109/JSSC.2010.2075310
|
| [21] |
Wagdy M F, Goff M. Linearizing average transfer characteristics of ideal ADC's via analog and digital dither. IEEE Trans Instrum Meas, 1994, 43, 146 doi: 10.1109/19.293411
|
| [22] |
Lee C C, Lu C Y, Narayanaswamy R, et al. A 12b 70MS/s SAR ADC with digital startup calibration in 14nm CMOS. 2015 Symposium on VLSI Circuits (VLSI Circuits), 2015, C62
|
| [23] |
Shen J H, Shikata A, Fernando L, et al. A 16-bit 16MS/s SAR ADC with on-chip calibration in 55nm CMOS. 2017 Symposium on VLSI Circuits Digest of Technical Papers, 2017
|
| [24] |
Maddox M, Chen B Z, Coln M, et al. A 16 bit linear passive-charge-sharing SAR ADC in 55nm CMOS. 2016 IEEE Asian Solid-State Circuits Conf (A-SSCC), 2016, 153
|

 WeChat ID
WeChat ID
Journal of Semiconductors © 2017 All Rights Reserved 京ICP备05085259号-2