


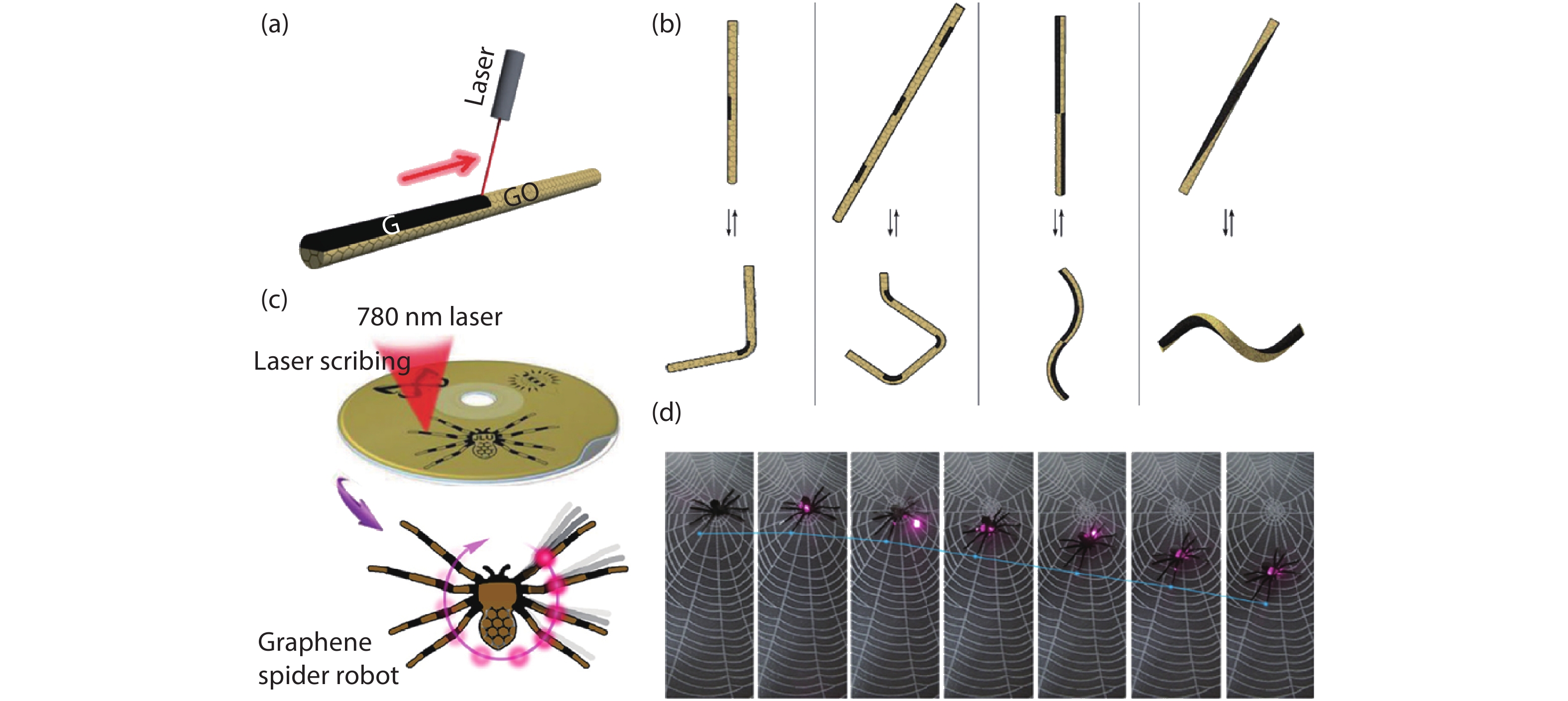
Fig. 1.
(Color online) (a) Laser reduction of GO fiber. (b) Various predesigned GO actuators. (c) Graphene spider robot made by one-step laser scribing method. (d) The walking spider robot.
NEWS AND VIEWS
Corresponding author: Yong-Lai Zhang, E-mail: yonglaizhang@jlu.edu.cn
| [1] |
Cheng H, Huang Y, Shi G, et al. Graphene-based functional architectures: sheets regulation and macrostructure construction toward actuators and power generators. Acc Chem Res, 2017, 50(7), 1663 doi: 10.1021/acs.accounts.7b00131
|
| [2] |
Chen L, Weng M, Zhou Z, et al. Large-deformation curling actuators based on carbon nanotube composite: advanced-structure design and biomimetic application. ACS Nano, 2015, 9(12), 12189 doi: 10.1021/acsnano.5b05413
|
| [3] |
Hu Y, Wu G, Lan T, et al. A graphene-based bimorph structure for design of high performance photoactuators. Adv Mater, 2015, 27(47), 7867 doi: 10.1002/adma.201502777
|
| [4] |
Dong Y, Wang J, Guo X, et al. Multi-stimuli-responsive programmable biomimetic actuator. Nat Commun, 2019, 10(1), 4087 doi: 10.1038/s41467-019-12044-5
|
| [5] |
You R, Liu Y Q, Hao Y L, et al. Laser fabrication of graphene-based flexible electronics. Adv Mater, 2019, 1901981 doi: 10.1002/adma.201901981
|
| [6] |
Cheng H, Liu J, Zhao Y, et al. Graphene fibers with predetermined deformation as moisture-triggered actuators and robots. Angew Chem Int Ed, 2013, 52(40), 10482 doi: doi.org/10.1002/anie.201304358
|
| [7] |
Han B, Zhang Y L, Zhu L, et al. Plasmonic-assisted graphene oxide artificial muscles. Adv Mater, 2019, 31(5), 1806386 doi: 10.1002/adma.201806386
|
| [1] |
Cheng H, Huang Y, Shi G, et al. Graphene-based functional architectures: sheets regulation and macrostructure construction toward actuators and power generators. Acc Chem Res, 2017, 50(7), 1663 doi: 10.1021/acs.accounts.7b00131
|
| [2] |
Chen L, Weng M, Zhou Z, et al. Large-deformation curling actuators based on carbon nanotube composite: advanced-structure design and biomimetic application. ACS Nano, 2015, 9(12), 12189 doi: 10.1021/acsnano.5b05413
|
| [3] |
Hu Y, Wu G, Lan T, et al. A graphene-based bimorph structure for design of high performance photoactuators. Adv Mater, 2015, 27(47), 7867 doi: 10.1002/adma.201502777
|
| [4] |
Dong Y, Wang J, Guo X, et al. Multi-stimuli-responsive programmable biomimetic actuator. Nat Commun, 2019, 10(1), 4087 doi: 10.1038/s41467-019-12044-5
|
| [5] |
You R, Liu Y Q, Hao Y L, et al. Laser fabrication of graphene-based flexible electronics. Adv Mater, 2019, 1901981 doi: 10.1002/adma.201901981
|
| [6] |
Cheng H, Liu J, Zhao Y, et al. Graphene fibers with predetermined deformation as moisture-triggered actuators and robots. Angew Chem Int Ed, 2013, 52(40), 10482 doi: doi.org/10.1002/anie.201304358
|
| [7] |
Han B, Zhang Y L, Zhu L, et al. Plasmonic-assisted graphene oxide artificial muscles. Adv Mater, 2019, 31(5), 1806386 doi: 10.1002/adma.201806386
|









Article views: 3301 Times PDF downloads: 61 Times Cited by: 0 Times
Received: Revised: Online: Accepted Manuscript: 22 November 2019Uncorrected proof: 27 November 2019Published: 09 December 2019
| Citation: |
Bing Han, Yong-Lai Zhang. Laser fabrication of graphene-based soft robots[J]. Journal of Semiconductors, 2019, 40(12): 120401. doi: 10.1088/1674-4926/40/12/120401
****
B Han, Y L Zhang, Laser fabrication of graphene-based soft robots[J]. J. Semicond., 2019, 40(12): 120401. doi: 10.1088/1674-4926/40/12/120401.

|
| [1] |
Cheng H, Huang Y, Shi G, et al. Graphene-based functional architectures: sheets regulation and macrostructure construction toward actuators and power generators. Acc Chem Res, 2017, 50(7), 1663 doi: 10.1021/acs.accounts.7b00131
|
| [2] |
Chen L, Weng M, Zhou Z, et al. Large-deformation curling actuators based on carbon nanotube composite: advanced-structure design and biomimetic application. ACS Nano, 2015, 9(12), 12189 doi: 10.1021/acsnano.5b05413
|
| [3] |
Hu Y, Wu G, Lan T, et al. A graphene-based bimorph structure for design of high performance photoactuators. Adv Mater, 2015, 27(47), 7867 doi: 10.1002/adma.201502777
|
| [4] |
Dong Y, Wang J, Guo X, et al. Multi-stimuli-responsive programmable biomimetic actuator. Nat Commun, 2019, 10(1), 4087 doi: 10.1038/s41467-019-12044-5
|
| [5] |
You R, Liu Y Q, Hao Y L, et al. Laser fabrication of graphene-based flexible electronics. Adv Mater, 2019, 1901981 doi: 10.1002/adma.201901981
|
| [6] |
Cheng H, Liu J, Zhao Y, et al. Graphene fibers with predetermined deformation as moisture-triggered actuators and robots. Angew Chem Int Ed, 2013, 52(40), 10482 doi: doi.org/10.1002/anie.201304358
|
| [7] |
Han B, Zhang Y L, Zhu L, et al. Plasmonic-assisted graphene oxide artificial muscles. Adv Mater, 2019, 31(5), 1806386 doi: 10.1002/adma.201806386
|

 WeChat ID
WeChat ID
Journal of Semiconductors © 2017 All Rights Reserved 京ICP备05085259号-2

 DownLoad:
DownLoad:

