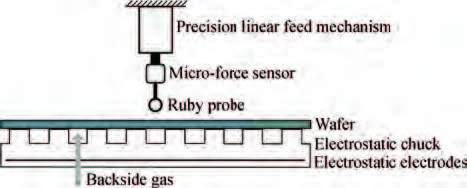
Fig. 1.
Schematic diagram of the new measuring method.
SEMICONDUCTOR DEVICES
Kesheng Wang1, 2, , Jia Cheng1, Yin Zhong1, 3 and Linhong Ji1
Corresponding author: Wang Kesheng,Email:wks11@mails.tsinghua.edu.cn
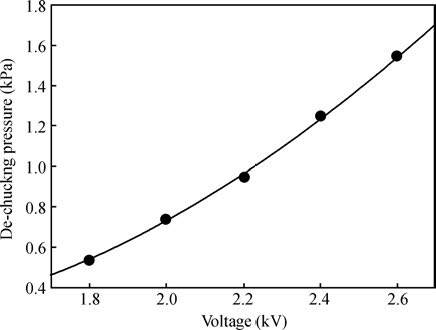
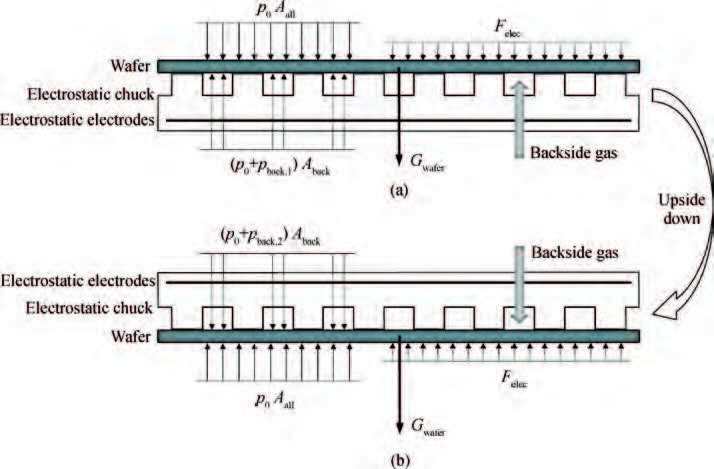
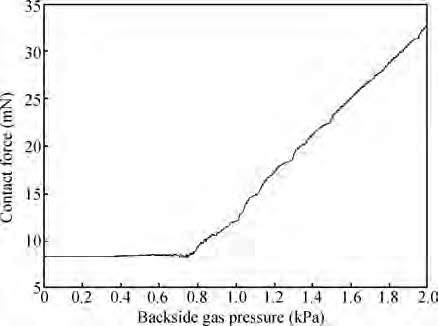
Abstract: Electrostatic chucks are one of the core components of semiconductor devices. As a key index of electrostatic chucks, the clamping force must be controlled within a reasonable range. Therefore, it is essential to accurately measure the clamping force. To reduce the negative factors influencing measurement precision and repeatability, this article presents a novel method to measure the clamping force and we elaborate both the principle and the key procedure. A micro-force probe component is introduced to monitor, adjust, and eliminate the gap between the wafer and the electrostatic chuck. The contact force between the ruby probe and the wafer is selected as an important parameter to characterize de-chucking, and we have found that the moment of de-chucking can be exactly judged. Moreover, this article derives the formula calibrating equivalent action area of backside gas pressure under real working conditions, which can effectively connect the backside gas pressure at the moment of de-chucking and the clamping force. The experiments were then performed on a self-designed measuring platform. The de-chucking mechanism is discussed in light of our analysis of the experimental data. Determination criteria for de-chucking point are summed up. It is found that the relationship between de-chucking pressure and applied voltage conforms well to quadratic equation. Meanwhile, the result reveals that actual de-chucking behavior is much more complicated than the description given in the classical empirical formula.
Keywords: electrostatic chuck, wafer, clamping force, de-chucking, measuring method
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] |

| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] |









Article views: 7557 Times PDF downloads: 471 Times Cited by: 0 Times
Received: 25 November 2015 Revised: Online: Published: 01 April 2016
| Citation: |
Kesheng Wang, Jia Cheng, Yin Zhong, Linhong Ji. A novel measuring method of clamping force for electrostatic chuck in semiconductor devices[J]. Journal of Semiconductors, 2016, 37(4): 044012. doi: 10.1088/1674-4926/37/4/044012
****
K S Wang, J Cheng, Y Zhong, L H Ji. A novel measuring method of clamping force for electrostatic chuck in semiconductor devices[J]. J. Semicond., 2016, 37(4): 044012. doi: 10.1088/1674-4926/37/4/044012.

|
| [1] | |
| [2] | |
| [3] | |
| [4] | |
| [5] | |
| [6] | |
| [7] | |
| [8] | |
| [9] | |
| [10] | |
| [11] | |
| [12] | |
| [13] |

 WeChat ID
WeChat ID
Journal of Semiconductors © 2017 All Rights Reserved 京ICP备05085259号-2

 DownLoad:
DownLoad: